




LáserAnálisis y procesamiento de señales de detección de voz remota
La decodificación del ruido de la señal: análisis y procesamiento de señales de detección remota de voz por láser
En el maravilloso mundo de la tecnología, la detección remota de voz mediante láser es como una hermosa sinfonía, pero esta sinfonía también tiene su propio "ruido": el ruido de la señal. Como un público inesperadamente ruidoso en un concierto, el ruido suele ser molesto.detección de voz por láserSegún la fuente, el ruido de la detección remota de señales de voz láser se puede dividir, a grandes rasgos, en el ruido introducido por el propio instrumento de medición de vibraciones láser, el ruido introducido por otras fuentes de sonido cercanas al objetivo de medición de vibraciones y el ruido generado por perturbaciones ambientales. La detección de voz a larga distancia requiere, en última instancia, obtener señales de voz que puedan ser reconocidas por el oído humano o por máquinas. Además, la gran cantidad de ruidos mixtos del entorno externo y del sistema de detección reducirá la audibilidad e inteligibilidad de las señales de voz adquiridas. La distribución de la banda de frecuencia de estos ruidos coincide parcialmente con la distribución de la banda de frecuencia principal de la señal de voz (aproximadamente 300~3000 Hz). No se puede filtrar simplemente con filtros tradicionales, por lo que se requiere un procesamiento adicional de las señales de voz detectadas. Actualmente, los investigadores estudian principalmente la eliminación de ruido de banda ancha no estacionaria y el ruido de impacto.
El ruido de fondo de banda ancha generalmente se procesa mediante el método de estimación de espectro de corto plazo, el método de subespacio y otros algoritmos de supresión de ruido basados en el procesamiento de señales, así como métodos tradicionales de aprendizaje automático, métodos de aprendizaje profundo y otras tecnologías de mejora del habla para separar las señales de habla pura del ruido de fondo.
El ruido impulsivo es el ruido moteado que puede introducirse por el efecto moteado dinámico cuando la luz del sistema de detección LDV altera la ubicación del objetivo de detección. Actualmente, este tipo de ruido se elimina principalmente detectando la ubicación donde la señal presenta un pico de alta energía y reemplazándola con el valor predicho.
La detección remota de voz por láser tiene perspectivas de aplicación en muchos campos, como la interceptación, la monitorización multimodo, la detección de intrusiones, la búsqueda y el rescate, los micrófonos láser, etc. Se puede predecir que la futura tendencia de investigación de la detección remota de voz por láser se basará principalmente en (1) mejorar el rendimiento de medición del sistema, como la sensibilidad y la relación señal-ruido, optimizando el modo de detección, los componentes y la estructura del sistema de detección; (2) Mejorar la adaptabilidad de los algoritmos de procesamiento de señales, de modo que la tecnología de detección de voz por láser pueda adaptarse a diferentes distancias de medición, condiciones ambientales y objetivos de medición de vibración; (3) Selección más razonable de objetivos de medición de vibración y compensación de alta frecuencia de señales de voz medidas en objetivos con diferentes características de respuesta de frecuencia; (4) Mejorar la estructura del sistema y optimizar aún más el sistema de detección mediante
miniaturización, portabilidad y proceso de detección inteligente.
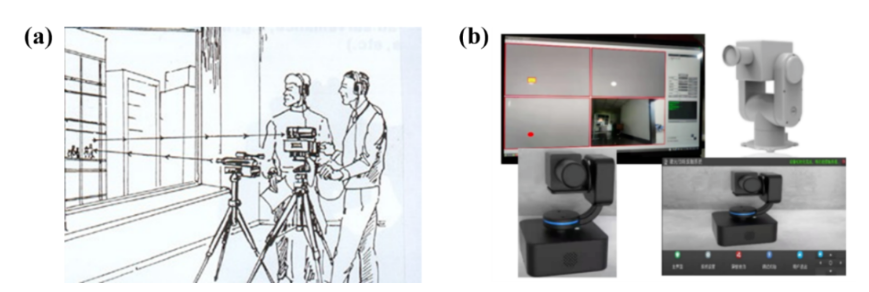
FIG. 1 (a) Diagrama esquemático de la interceptación láser; (b) Diagrama esquemático del sistema antiinterceptación láser
Hora de publicación: 14 de octubre de 2024