




Diseño defotónicacircuito integrado
circuitos integrados fotónicosLos interferómetros fotónicos integrados (PIC) a menudo se diseñan con la ayuda de fórmulas matemáticas debido a la importancia de la longitud del recorrido en interferómetros u otras aplicaciones que son sensibles a la longitud del recorrido.PICSe fabrica mediante la deposición de múltiples capas (normalmente de 10 a 30) sobre una oblea, compuestas por numerosas formas poligonales, a menudo representadas en formato GDSII. Antes de enviar el archivo al fabricante de la fotomáscara, es fundamental simular el PIC para verificar la corrección del diseño. La simulación se divide en varios niveles: el nivel más bajo es la simulación electromagnética (EM) tridimensional, que se realiza a nivel sublongitudinal, aunque las interacciones entre los átomos del material se tratan a escala macroscópica. Los métodos típicos incluyen el método de diferencias finitas en el dominio del tiempo tridimensional (3D FDTD) y la expansión de modos propios (EME). Estos métodos son los más precisos, pero resultan poco prácticos para todo el tiempo de simulación del PIC. El siguiente nivel es la simulación EM bidimensional y media, como la propagación de haces por diferencias finitas (FD-BPM). Estos métodos son mucho más rápidos, pero sacrifican algo de precisión y solo permiten la propagación paraxial, por lo que no pueden utilizarse para simular resonadores, por ejemplo. El siguiente nivel es la simulación EM 2D, como FDTD 2D y BPM 2D. Estas también son más rápidas, pero tienen funcionalidad limitada, por ejemplo, no pueden simular rotadores de polarización. Un nivel más avanzado es la simulación de la matriz de transmisión y/o dispersión. Cada componente principal se reduce a un componente con entrada y salida, y la guía de onda conectada se reduce a un elemento de desplazamiento de fase y atenuación. Estas simulaciones son extremadamente rápidas. La señal de salida se obtiene multiplicando la matriz de transmisión por la señal de entrada. La matriz de dispersión (cuyos elementos se denominan parámetros S) multiplica las señales de entrada y salida de un lado para encontrar las señales de entrada y salida del otro lado del componente. Básicamente, la matriz de dispersión contiene la reflexión dentro del elemento. La matriz de dispersión suele ser el doble de grande que la matriz de transmisión en cada dimensión. En resumen, desde la electromagnetismo 3D hasta la simulación de matrices de transmisión/dispersión, cada capa de simulación presenta una compensación entre velocidad y precisión, y los diseñadores eligen el nivel de simulación adecuado para sus necesidades específicas con el fin de optimizar el proceso de validación del diseño.
Sin embargo, basarse en la simulación electromagnética de ciertos elementos y utilizar una matriz de dispersión/transferencia para simular todo el circuito integrado fotónico (PIC) no garantiza un diseño completamente correcto frente a la placa de flujo. Por ejemplo, es probable que durante la simulación no se detecten longitudes de trayectoria mal calculadas, guías de onda multimodo que no suprimen eficazmente los modos de orden superior, o dos guías de onda demasiado próximas entre sí que provoquen problemas de acoplamiento inesperados. Por lo tanto, aunque las herramientas de simulación avanzadas ofrecen potentes capacidades de validación del diseño, aún se requiere un alto grado de vigilancia e inspección minuciosa por parte del diseñador, junto con experiencia práctica y conocimientos técnicos, para garantizar la precisión y fiabilidad del diseño y reducir el riesgo del diagrama de flujo.
Una técnica denominada FDTD dispersa permite realizar simulaciones FDTD 3D y 2D directamente sobre un diseño PIC completo para validarlo. Si bien es difícil para cualquier herramienta de simulación electromagnética simular un PIC a gran escala, la FDTD dispersa puede simular un área local bastante grande. En la FDTD 3D tradicional, la simulación comienza inicializando los seis componentes del campo electromagnético dentro de un volumen cuantificado específico. A medida que avanza el tiempo, se calcula el nuevo componente del campo en el volumen, y así sucesivamente. Cada paso requiere muchos cálculos, por lo que lleva mucho tiempo. En la FDTD 3D dispersa, en lugar de calcular en cada paso en cada punto del volumen, se mantiene una lista de componentes del campo que teóricamente puede corresponder a un volumen arbitrariamente grande y se calcula solo para esos componentes. En cada paso de tiempo, se agregan puntos adyacentes a los componentes del campo, mientras que se descartan los componentes del campo por debajo de un cierto umbral de potencia. Para algunas estructuras, este cálculo puede ser varios órdenes de magnitud más rápido que la FDTD 3D tradicional. Sin embargo, los FDTDS dispersos no funcionan bien al tratar con estructuras dispersivas, ya que en estos casos el campo se dispersa demasiado, lo que da como resultado listas demasiado largas y difíciles de gestionar. La Figura 1 muestra una captura de pantalla de ejemplo de una simulación FDTD 3D similar a un divisor de haz polarizado (PBS).
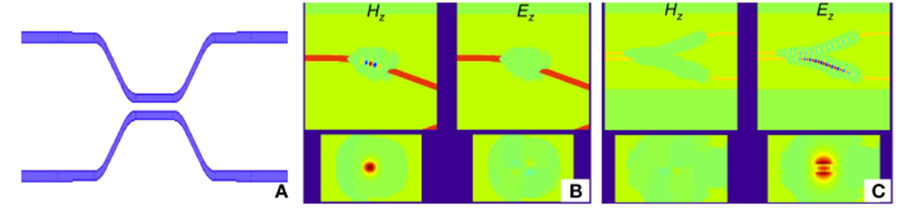
Figura 1: Resultados de la simulación de FDTD disperso 3D. (A) es una vista superior de la estructura que se está simulando, que es un acoplador direccional. (B) Muestra una captura de pantalla de una simulación con excitación cuasi-TE. Los dos diagramas superiores muestran la vista superior de las señales cuasi-TE y cuasi-TM, y los dos diagramas inferiores muestran la vista transversal correspondiente. (C) Muestra una captura de pantalla de una simulación con excitación cuasi-TM.
Fecha de publicación: 23 de julio de 2024